Autonomous Search and Rescue System
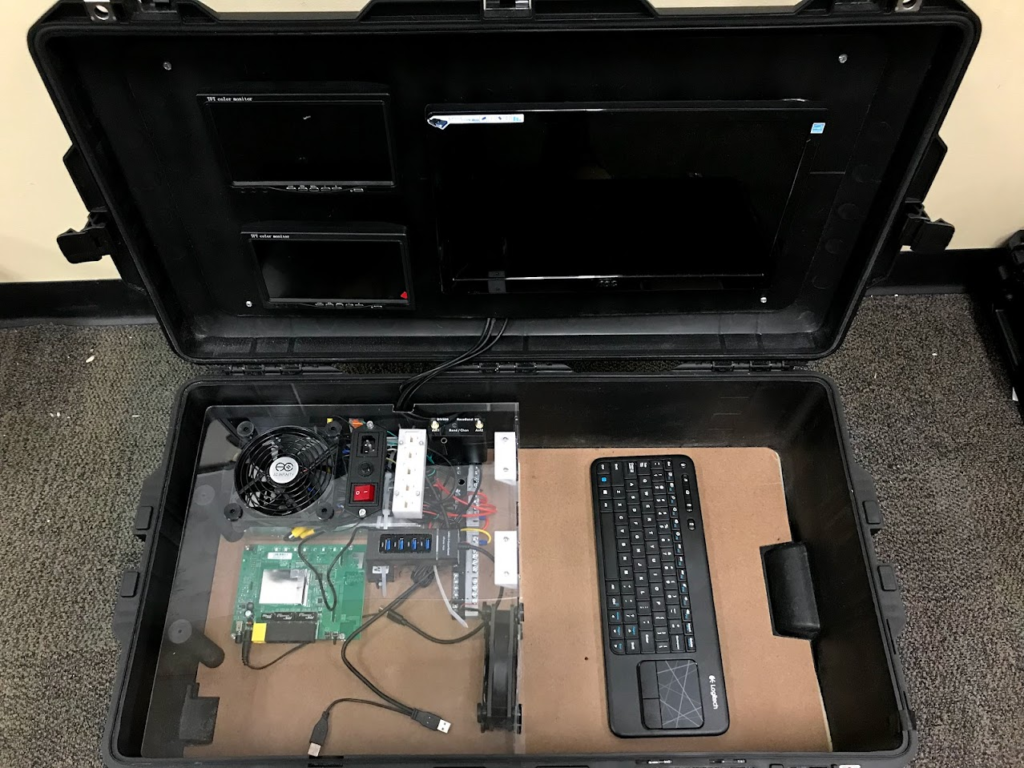
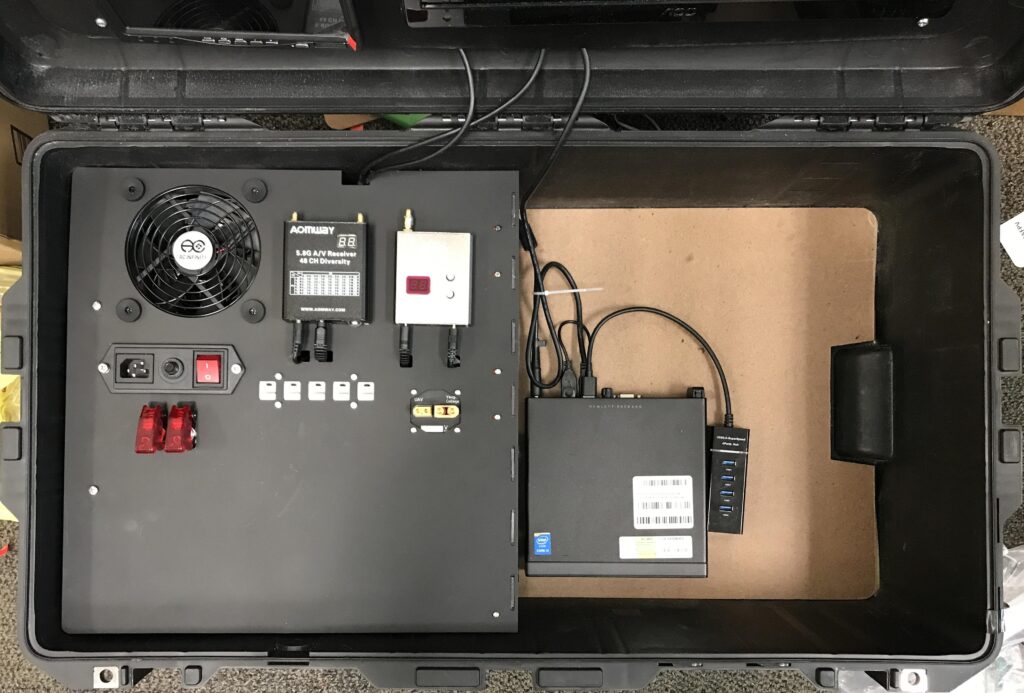
For my senior degree project, my partner and I worked on a two-part system that was for long-distance drone missions. The first part of the system was an Antenna Tracker- an antenna on a two-axis tripod that would follow a drone so that the attached antennas would point directly at the drone. The second part of the system was the Ground Control Station- a ground station for monitoring the mission and the drone. Combined, one would be able to have full telemetry, video, and control of the drone. Our vision was to create a system capable of delivering aid to people in remote or inaccessible areas.
We chose to use our two-part system at the 17th Annual AUVSI Student UAS Competition (2019). This was Vaughn College’s first time at this particular student competition – in the end, we ranked 26th place out of 75 teams. The rankings can be found here.
In addition, we wrote a paper on the project and submitted it to LACCEI, where it was published.